Harvard’s new RoboBee can fly in and out of water

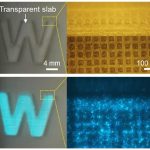
Apparently, we haven’t seen RoboBee’s final form yet. Harvard researchers introduced the robot back in 2013 and developed a version that uses static to stick to walls in 2016. Now, the scientists have created an upgraded robotic bee that can fly, dive into water and hop right back up into the air. That’s a lot tougher than it sounds, since the tiny machine is only two centimeters tall and is about one-fifteenth the weight of a penny. For such a small robot, swimming in water is like swimming in molasses and breaking through the water’s surface is akin to breaking through a brick wall.
To solve the issue, the researchers from Harvard Wyss Institute and John A. Paulson School of Engineering designed new mechanisms that make it possible for the RoboBee to transition seamlessly from water to air. First, they had to figure out the right flapping speeds for its wings in aerial and aquatic environments. By using a combination of theoretical modeling and experimental data, they determined that 220 to 300 hertz is perfect for aerial travel, while 9 to 13 hertz is the perfect speed in the water.
Once that was done, they had to figure out how the machine can break surface tension to be able to get out of the water. They came up with a two-step system: First, the machine collects water into a buoyancy chamber as it swims to the surface. An electrolytic plate inside the chamber converts the water into oxyhydrogen, which provides enough extra buoyancy for the robot’s wings to pop out of the water. A sparker in the chamber then ignites the combustible oxyhydrogen, turning it into fuel that gives RoboBee the boost it needs to be able to get back into the air.
In the future, microrobots can be used for search missions, deployed to far-off places for surveillance before sending in bigger machines to rescue people. The RoboBee team hopes their work “investigating tradeoffs like weight and surface tension can inspire future multi-functional microrobots — ones that can move on complex terrains and perform a variety of tasks.”
(12)